1. Introduction
This book challenges to design and control robots made entirely of electroactive polymer gels. They are deformable like mollusk that can locomote dynamically or manipulate things softly. Such a machine has been a dream in the past but is now experimentally possible. Gel robots are made from electroactive polymer gels. The purpose in creating these machines is to investigate fundamental principles in the design and control of machines comprising of soft and active materials.
This book is organized in three parts corresponds to three steps. Part I deals with modelling (in chapter 2 and 3). Part II studies design (in chapter 4 to 6). Part III addresses the issue of control (in chapter 7 and 8). This chapter (chapter 1) is introductory while last chapter (chapter 9) is concluding remark.
Aside from the above categories, characteristics of each chapter are classified into two. Synthetic chapters are chapter 2, 5, 6, and 8. Analytic chapters are chapter 3, 4, and 7.
Structure of this book (Fig. 1.2 of [Otake2009])
Part Ⅰ Modelling
2. Deformation Model
It was proposed that modelling framework for actively deformable materials, and machines whose bodies are organized by distributing the materials. Activeness of the material is written in adsorption equation, while deformability of the material is represented with continuum mechanics. By modelling both properties respectively, we can approximate the system effectively, even though strictly speaking, both processes are coupled. Based on the adsorption-induced deformation model, we derived specific constitutive equation of typical electroactive polymer gel, poly 2-acrylamido-2-methylpropane sulfonic acid (PAMPS) gel, and its co-polymer gel. It contains two equations with two main parameters.
Illustrated deformation process of the gel (Fig. 2.2 of [Otake2009])
3. Parameter Inentificaition
Parameter identification method was proposed based on mechanism. We can identify adsorption parameter and dissociation parameter by observing the deformation response of the beam-shaped gel in uniform electric field. The tip position and orientation of beam-shaped gel is a function of internal state of the whole gel. Therefore, we can identify parameters through observation of the tip.
Experimental deformation of the gel (Fig. 3.7 of [Otake2009])
Part Ⅱ Design
4. Deformable Machines
The method was shown for defining design and control variables based on the model. Design variables mainly belong to materials, while control variables mainly belong to fields. Therefore, the position of these variables in the constitutive equation determines the role of parameters. For PAMPS gel system, control variable is proportional to the deformation response, whereas design variable is inversely proportional to the deformation response. Therefore, it is equivalent to make the gel thinner and to apply electric field stronger.
5. Electric Field Design
The electric field generation system was designed and developed based on the model, and a variety of unknown forms and motions of the gels was derived. The known configuration of the electrodes to drive the material was parallel. Also, one or both sides of the tip should have been fixed to keep the distance between the material and the electrodes. The designed multiple electrodes was horizontally configured, and the gel was placed underneath the electrodes. With this setup, the following shapes were derived: convex shape, concave shape, hairpin shape, and heart shape. These results suggest that the possible performance, in this case, shapes and motions, of these materials are not fully investigated.
Matrix of electrodes (Fig. 5.15 of [Otake2009])
6. Shape Design
The manufacturing system was designed and developed to form gels into variety of shapes, and showed diverse deformation of the gels. Changing the design parameters like thickness and width can alter structural stiffness. Firstly, thickness-distributed and cut gels were developed for reducing the relative degrees of freedom, which showed organized motions. Secondly, deformation response of beam-shaped gel with different width was compared, and the importance of structural stiffness change after deformation was discovered. Therefore, the original shape of the material defines initial state of the deformation process.
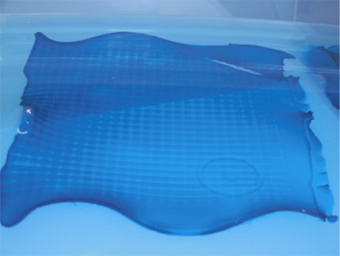
Gels with wave-shaped surfaces (Fig. 6.5 of [Otake2009])
Part III Control
7. Shape Control
Methods for reaching the objective shape of the gel based on the model were proposed. Series of input to the gel was applied to reach the goal in order to compensate the lack of input numbers compared to degrees of freedom. It was found that switching the polarity of spatially uniform electric field at the right moment could derive variety of shapes. Based on the simulation, we experimentally derived shapes of the letter 'C' with one pole, 'S' with two poles, 'E' with three poles, 'J' with tip curved, 'L' with root curved.
Simulated deformation process of the gel (Fig. 7.28 of [Otake2009])
8. Motion Control
It was proposed that the method for generating objective motion considering dynamics of the system. It was selected that righting motion generation for a starfish-shaped gel robot as a typical case study. It was shown a systematic method for bringing out objective motion considering dynamics of material, field, and interaction. Righting motion of starfish-shaped gel robots was successfully generated. This method was also applied to different kinds of motion, twisting an object of tentacle-type gel.
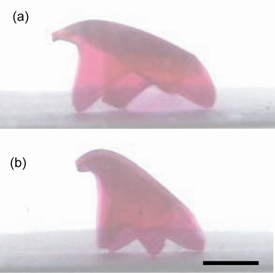
Righting motions of starfish-shaped gel robots (Fig. 8.26 of [Otake2009])
9. Conclusion
Variety of shapes and motions were derived through developing novel driving and manufacturing system with predictive simulator based on the proposed model. The shapes and motions of gels and gel robots were sometimes beyond imagination. It should be emphasized that the originally known motion was only swinging motion of beam-shaped gel between pairs of electrodes.
- Combination of fix-ended beam-shaped gel and parallel placed electrodes (Ordinary combination): C shape, S shape, E shape, J shape, L shape (chapter 7)
- Combination of free-ended beam-shaped gel and arrays of multiple electrodes: Convex shape, asymmetry 'ˆ' shape, Concave shape, '6' shape, Hair-pin shape, righting motion (chapter 5 and 8)
- Combination of free-ended beam-shaped gel and arrays of multiple electrodes: twisting of objects (chapter 8)
- Combination of gel with wave-shaped surfaces and matrix of multiple electrodes: Uni-directional curving, Bi-directional curving (chapter 6)
- Combination of starfish-shaped gel robot and matrix of multiple electrodes: Righting motion (chapter 8)
Internal state of electroactive polymers keeps the history of electric input, which is the origin of potential smartness. With this in mind, we can bring out intelligence from smart materials.
Bibliography
[Otake2009] Mihoko Otake, Electroactive Polymer Gel Robots - Modelling and Control of Artificial Muscles, Springer Tracts in Advanced Robotics, Vol.59, Springer-Verlag, 2009. (ISBN 978-3-540-23955)